whatsapp:+86 13622680352

How to Choose Helical Gear Reducer for Servo-Driven Rotary Tables
In high-precision automation systems, servo-driven rotary tables are widely used in inspection stations, assembly lines, CNC indexing, and robotic positioning. The performance of these systems depends heavily on the gear reducer—especially when low backlash, high rigidity, and dynamic response are required.
This guide explains how to select the right helical gear reducer for servo rotary tables, focusing on four critical engineering factors:
backlash control, torsional stiffness, inertia matching, and acceleration/deceleration performance.

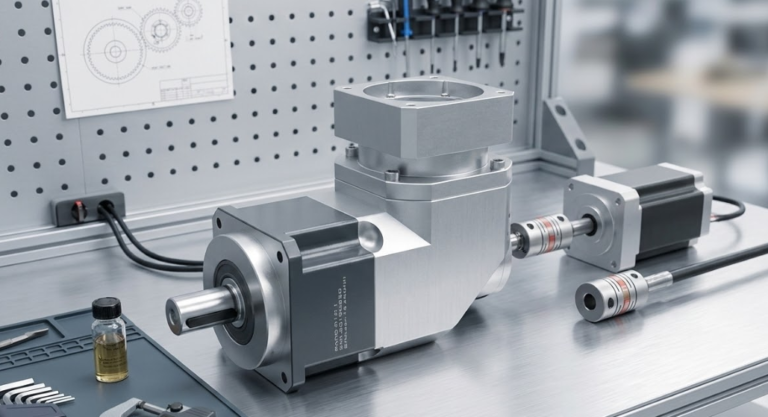
1. Why Use Helical Gear Reducers in Servo Rotary Tables?
Helical gear reducers are preferred in many rotary table applications because they offer:
- Smooth and quiet transmission due to gradual tooth engagement
- High load capacity with improved contact ratio
- Stable operation under continuous duty cycles
- Better vibration damping, ideal for precision workstations
Compared with other gearbox types, helical gear units strike a balance between precision, durability, and cost efficiency.
2. Backlash Control (< Arcmin Level)
What is Backlash?
Backlash is the angular clearance between mating gear teeth, directly affecting:
- Positioning accuracy
- Repeatability
- System stability
Why It Matters in Rotary Tables
For servo-driven systems, excessive backlash leads to:
- Positioning errors
- Oscillation during direction reversal
- Reduced repeat accuracy
Engineering Target
- Standard industrial: 5–15 arcmin
- Precision automation: <5 arcmin
- High-end positioning: ≈1–3 arcmin (optimized designs)
How to Reduce Backlash in Helical Gear Reducers
- Precision gear grinding (DIN 5–6 or better)
- Preloaded bearing arrangements
- Optimized center distance control
- Dual-stage or hybrid (helical + planetary) structures
3. Torsional Stiffness vs Positioning Accuracy
Definition
Torsional stiffness refers to the resistance of the gearbox to elastic deformation under load.
Relationship to Accuracy
Higher stiffness results in:
- Less angular deflection under torque
- Improved positioning accuracy and repeatability
- Reduced vibration and “spring-back” effects
Key Insight
Even with low backlash, low stiffness can still degrade accuracy due to elastic deformation.
Design Considerations
- Shorter torque transmission path
- Larger shaft diameters
- High-rigidity housing structure
- High-quality bearings with preload
4. Servo Inertia Matching Principles
Why Inertia Matching Matters
Servo systems require a balance between:
- Motor inertia
- Load inertia (including gearbox and rotary table)
Poor matching leads to:
- Overshoot or oscillation
- Slow response
- Increased servo tuning complexity
Recommended Ratio
A commonly accepted guideline:
- Load inertia / motor inertia = 3:1 to 10:1
Role of Gear Reducer
A helical gear reducer helps:
- Reflect load inertia to the motor side
- Optimize dynamic response
- Improve system stability
Selection Tip
Choose the gear ratio so that:
- The reflected inertia falls within the servo’s optimal control range
- The motor operates in its efficient torque-speed zone
5. Acceleration and Deceleration Impact Analysis
Servo rotary tables often operate under:
- Frequent start-stop cycles
- Rapid acceleration and deceleration
- Bidirectional motion
Key Challenges
- Shock loads on gear teeth
- Increased bearing stress
- Heat generation
Engineering Considerations
5.1 Peak Torque Capacity
Ensure the gearbox can handle:
- Acceleration torque (Ta)
- Emergency stop torque
5.2 Duty Cycle
Evaluate:
- Number of cycles per minute
- Continuous vs intermittent operation
5.3 Thermal Performance
- Efficient lubrication
- Heat dissipation design
- Avoid overheating under high-frequency motion
5.4 Structural Durability
- Hardened gear surfaces
- High fatigue strength materials
6. Advanced Design Trends
6.1 Helical + Planetary Hybrid Systems
- Combine low noise (helical) with low backlash (planetary)
- Used in high-end rotary positioning systems
6.2 Right-Angle Compact Drives
- Helical + bevel or worm configurations
- Ideal for space-constrained rotary axes
6.3 Integrated Servo Rotary Actuators
- Gear reducer + servo motor + encoder in one unit
- Simplifies installation and improves alignment accuracy
7. Custom Solutions for Servo Rotary Tables
Selecting a standard gearbox is often insufficient for precision automation. Key customization parameters include:
- Backlash level (arcmin specification)
- Gear ratio and torque rating
- Mounting configuration (inline / right-angle)
- Input compatibility with servo motors
- Output flange design for rotary tables
NUODUN, a UK gear reducer supplier, specializes in custom helical gear reducers for servo-driven applications, offering:
- Low-backlash optimized designs
- High-rigidity gearbox structures
- Flexible integration with servo motors and rotary tables
- Engineering support for OEM automation systems
FAQ: Helical Gear Reducers for Servo Rotary Tables
1. What is the ideal backlash for a servo rotary table?
For most precision applications, <5 arcmin is recommended. High-end systems may require 1–3 arcmin.
2. Is low backlash enough to ensure high accuracy?
No. Torsional stiffness is equally important. Low stiffness can still cause positioning errors due to elastic deformation.
3. How do I match a servo motor with a gear reducer?
Focus on:
- Inertia ratio (3:1 to 10:1 recommended)
- Required torque and speed
- Application duty cycle
4. Can helical gear reducers handle frequent reversing motion?
Yes, if properly designed with:
- High-quality materials
- Adequate lubrication
- Sufficient torque margin
5. When should I use a planetary gearbox instead?
Choose planetary reducers when:
- Ultra-low backlash is required
- Space is very limited
- High torque density is critical
6. Are integrated servo gear units better?
In many cases, yes. They provide:
- Easier installation
- Better alignment
- Improved system reliability
Conclusion
Choosing the right helical gear reducer for a servo-driven rotary table requires a holistic evaluation of:
- Backlash control (precision)
- Torsional stiffness (rigidity)
- Inertia matching (dynamic performance)
- Acceleration/deceleration loads (durability)
By optimizing these parameters, you can achieve high positioning accuracy, stable operation, and long service life in demanding automation environments.
For tailored solutions, NUODUN offers custom-engineered helical gear reducers designed specifically for servo rotary table applications, ensuring optimal performance and system integration.